UNIVERSAL SONAR MOUNT
KONGSBERG SEAPATH
KONGSBERG SEAPATH
Couldn't load pickup availability
The Seapath 130 series is developed specifically for hydrographic surveying where high precision heading, position, roll, pitch, heave and timing are critical measurements. The product combines state-of-the-art dual frequency GNSS receivers, inertial technology and processing algorithms in a compact and portable package.
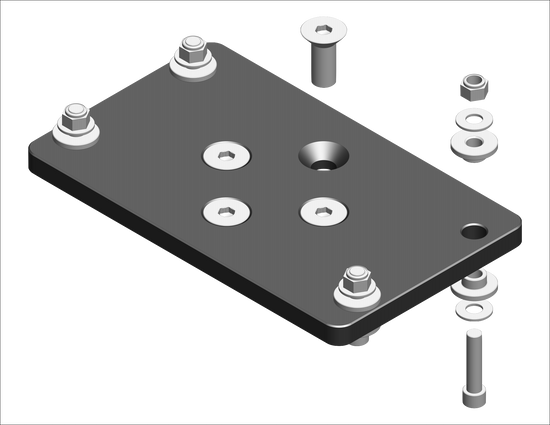
Product components:
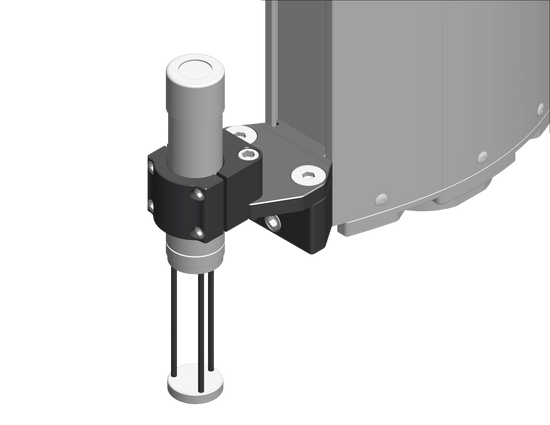
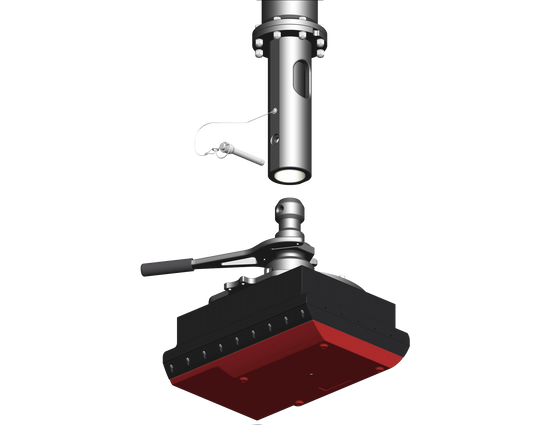
The main component is the Sensor Unit with the integrated GNSS antennas and receivers. The Sensor Unit mounts on top of the vessel mast or a pole. On top of the transducer the inertial sensor of type MRU 3, H, 5 and 5+ is mounted within a light weight subsea housing. The Seapath operator software is installed on a connected PC for configuration and monitoring. All the components are connected through a spider cable with MRU connection, three configurable output serial lines, DGNSS correction input, 1PPS output, network communication and power.
Interfaces:
The product has three configurable RS-232/422 serial lines and eight Ethernet ports for output of motion data and NMEA messages to the multibeam and survey computer. DGNSS corrections of various quality and sources are input on a configurable RS-232/422 serial line or Ethernet.
Function:
The advanced Seapath navigation algorithms integrate RTK GNSS data with the inertial sensor data from the MRU. This gives the Seapath 130 unique advantages compared to stand- alone RTK products. The Seapath product’s accurate roll, pitch and heading measurements allow the RTK antenna position to be referenced to any point on the vessel where accurate position and velocity are required. All data from Seapath have the same time stamp and the output is in real-time. Subdecimetre position accuracy can be achieved through download of satellite orbit and clock data from the internet and by post processing of satellite and IMU data.


-

EXPEDITION
SHOP EXPEDITION KITS -
ADAPTERS
SHOP ADAPTERS -
ACCESSORIES
SHOP OPTIONAL EQUIPMENT